
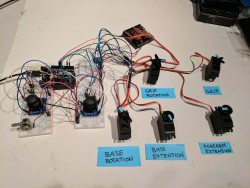
I laid out the components and wired the circuit provided in the Arduino Robotic Arm Instructable. I made a few alterations to the design already: first, I am using metal gear servos as I indicated in my previous post, instead of the plastic gear micro-servos that were suggested for the grip and grip rotation. Second, given the extra load of the two larger servos and not knowing yet how long or heavy I will make the arm pieces, I am concerned that there may be potentially high current loads when I attempt to use the arm to grab, lift, and move objects. Therefore, I decided to add a separate 4-cell AA battery pack to power the servos and prevent it from burning out my Arduino.
Here’s what the wired circuit and servos look like:
Next Steps
Now that I have the circuit wired, my next step is to begin testing the code. I plan to record a video of the test to share here.